
服务热线
0351-3530917
交流园地
SHANXI HUAYE SURVEY


机载激光雷达在密林山区大比例尺测图的应用
摘要:针对密林山区大比例尺地形图测绘有效采集地表特征点的相关问题。提出了无人机机载激光雷达通过点云采集、滤波技术获取地表坐标信息。基于机载激光雷达采集的点云数据与传统RTK测量采集的特征数据进行对比分析。研究结果表明:无人机机载雷达测绘系统外业效率高、周期短、精度高,研究结果可应用于密林山区大比例尺地形图测绘。
关键词:密林山区;大比例尺地形图测绘;机载激光雷达;点云
0 引言
机载激光雷达系统是20世纪70年代以后发展起来的一种新兴航测技术,是继摄影测量技术之后一场新的技术变革。该测绘系统集飞行平台、GPS、IMU、相机、激光扫描仪于一体,属于主动测量手段[1]。通过对地发射激光脉冲记录反射脉冲的时间间隔,进而计算脉冲路径距离,结合POS和IMU数据从而计算出大量点云数据的坐标信息。在植被覆盖密集山区进行大比例尺地形图测绘,摄影测量方法受地表植被影响,无法采集植被遮挡下的地表数据。传统的工测技术手段,周期长、效率低、人员安全和工程进度无法得到有效保障。
机载激光雷达系统设备轻巧、安装方便、不受天气影响。激光脉冲能够穿透植被,快速获取大量的点云数据[2],在高植被覆盖区域的地形图测绘中优势明显。高植被覆盖山区植被茂密,地形复杂,通过机载激光雷达扫描的大量点云数据,通过滤波技术过滤植被和地表构筑物等,进而准确获取地表高程数据是关键所在。目前机载激光雷达技术在电力巡检、林业普查、地质勘查、城市三维建模等领域都有着广泛的应用。本文从机载激光雷达测绘系统的原理、构成、关键技术等角度,以实际项目为背景利用机载激光雷达技术对高植被覆盖山区大比例地形图测绘的可行性进行研究分析。
1 机载激光雷达测绘系统
机载激光雷达测绘系统是一种新型的测量技术,通过发射激光脉冲,快速获取大量地表的点云数据[3]。激光雷达向被测物体发射激光束,通过比较处理发射信号与接受信号,然后获得目标物的形状、位置、速度、姿态等参数。该系统通过非接触式测量,受天气影响小,可以24小时全天候作业,能够在不同高度获取大范围高密度点云。因此在超大面积区域和在人员无法到达的复杂地形以及受植被遮挡严重的区域有着广阔的应用前景。机载激光雷达系统示意图如图1所示。
1.1 机载激光雷达测绘系统原理
机载激光雷达系统由飞行平台、GPS、IMU、相机、激光扫描仪组成。激光雷达由激光发射器,反射激光接收器,数据处理端组成[4]。激光具有直线发射,不易散射,能够穿透植被,不受天气影响等特点。机载激光雷达技术是基于激光的这些特性而研发。在测量过程中,由激光发射器发射激光脉冲,激光接收器接收反射回来的激光脉冲,根据记录的激光束往返发射器和接收器之间的时间间隔T,和激光束在空气中的传播速度V,计算得到激光发射器距离被测物体的距离S,S=(T×V)/2[5]。结合惯性传感器IMU测量的角元素(λψω)和GPS测量激光发射器的线元素(X Y Z),可以精确的计算得到被测目标的三维坐标。将海量的被测目标的三维坐标值离散的展现在计算机处理器上便形成了激光点云。
1.2机载激光雷达测绘系统的优缺点
1.2.1机载激光雷达的优点
1)具有极高的精确度、较高的灵活性及安全性。
2)理论上可以24小时全天候作业,对天气条件依赖较小,传统无人机摄影测量对风速、太阳高度角、日照光线依赖性较强,需要良好的天气条件。
3)在外业作业过程中不需要采集控制点,通过激光扫描可以在很短的时间内获取大区域地表数据信息,与传统的测量手段相比,极大的减少了外业的工作量,缩短了工作周期,提高了工作效率[6]。
4)在高密度植被覆盖区域传统无人机摄影测量无法穿透植被,需要配合RTK、全站仪进行实地补测和调绘或者采用量取植被高预估地表高程的方法,而机载激光雷达可以穿透植被,通过滤波可以获取地表高程数据。
5)在进行带状地形图测绘或者电力巡检、大比例尺地形图生产方面,机载激光雷达的优势是传统无人机摄影测量无法比拟的。
6)在地形复杂危险区域,利用激光雷达非接触式扫描可以使作业安全得到有效保障。比如在地质灾害区、毒气排放等危险区域测绘作业。
7)随着激光雷达技术的突飞猛进,点云采集密度远高于传统测绘,测点的密度和精度都比较均匀。
1.2.2机载激光雷达的缺点
1)点云数据量庞大对计算机设备的性能要求较强。
2)高精度的机载激光雷达相对于最新涌起的大疆无人机摄影测量设备来说价格昂贵,价格制约着机载激光雷达测量系统的普及。
3)机载激光雷达内业处理方面自动化程度较低,对作业人员的操作水平要求较高。机载激光雷达在航迹解算、点云数据分类、点云滤波自动化处理等方面仍有较大的提升空间。
4)目前无人机电池技术并没有获得质的突破导致无人机滞空时间比较短,可以连续测量作业的范围不够大。
5)在大比例地形图测绘方面,点云数据不一定落在沟坎等特征线上,仍需要搭配相机采集的航摄影像来补充采集特征点数据。在大比例测图领域机载激光雷达测绘系统仍受天气条件的制约。
1.3机载激光雷达测绘系统的应用
1)通过航迹解算、点云分类滤波等处理可以生成DSM、DEM、DOM、DTM等,这些数据均可以直接运用于各类大数据应用系统的开发和应用[7]。
2)点云数据结合航摄相片可以制作生产城市三维模型,在智慧城市、数字城市方面应用广泛。
3)在土建施工方面,可以快速获取地表高程数据生产DEM,极大的方便了土石方量计算。
4)在森林调查方面,可以定期监测森林资源的覆盖范围、树木的生长状况、植被覆盖率等,方便进行林业资源管理。
2 机载激光雷达测绘系统在1:500地形图中的应用及精度分析
2.1项目区概况
本文主要以实例项目证明在高植被覆盖山区利用机载激光雷达测绘技术,获取的地表高程点的数量及精度能满足1:500比例尺地形图测绘的要求。根据工程的需要对山西省某市某县某村进行1:500地形图测绘。其地理坐标为东经112. ******°~112. ******°,测区东西长2.4km,南北长0.5km,测区面积1.714㎞²。赵某村与董某村、张某村、周某村、谢某村等村相邻。测区植被茂盛,以灌木丛、酸刺、树木为主。地貌特征主要为山地。测区最高海拔为1071m,最低海拔为868m。最大高差约为200m。实地地形复杂,采用传统工测手段外业工作量大,难度系数高,且人员及设备的安全无法得到有效保障。无人机航空摄影测量由于无法穿透植被[8],无法有效采集地表高程,如果配合传统工测方法进行外业补测,外业工作量很大。为了完成工作任务,本次采用飞马D2000无人机,搭载D2000机载激光雷达系统。
2.2数据采集
①仪器设备安装与调试 飞马D2000无人机、机载激光雷达、计算机等地面监控站。
②起降点选择及航线规划为了有效监控无人机的飞行状态及节省电源消耗,并且考虑飞机起降的安全应实地选择合理的起降点。航高设置为130m,航速13.5m/s,航线间距92m,航带重叠度50%。飞行总里程26.936公里,飞行时间为36分钟。
③数据采集 本次共采集数据量21G,点云数量3.6亿。
④数据准备 用无人机飞行管家链接无人机导出POS数据,包括GPS数据和IMU数据。有地面基准站的还需导出地面基准站坐标数据。
⑤航迹解算 将POS数据、点云数据、星历数据等导入无人机管家智激光联合平差进行航迹解算[9]。航迹解算结果如图2所示。
⑥点云解算 航迹数据、飞机姿态旋偏角数据、激光测距数据S、激光扫描角度数据导入智激光软件进行融合解算,可以计算得到每个测点的CGCS坐标系下的坐标数据(X Y Z)。在同一空间参考系下海量测点的集合即为点云。常见的点云格式为Las格式[10]。附色之后的点云解算结果如图3所示。 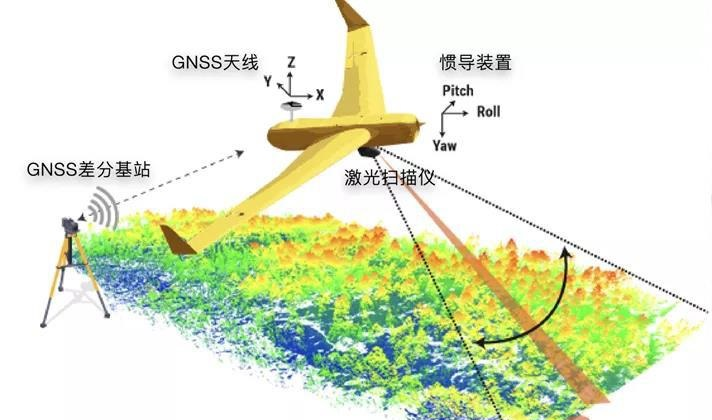
图1机载激光雷达系统示意图
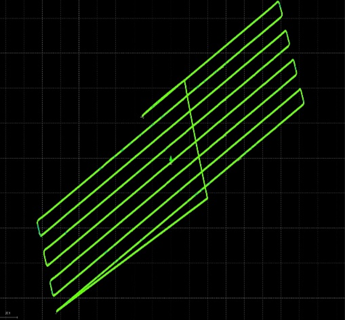 图2 航迹解算效果图
图2 航迹解算效果图
⑦激光滤波和点云分类 将激光点云数据的高程异常突变点、噪声等异常值进行剔除处理,并将地面点数据和非地面点数据进行分类,其中包括建筑物、植被、地面点数据。可以利用智激光软件对点云数据进行剖面检查。
⑧利用分类后的点云数据生成DEM、DSM、DLG。同时可以结合航摄相片生成DOM。测区 1:500DLG数据如图4所示。
 图3 附色后的点云解算数据
图3 附色后的点云解算数据
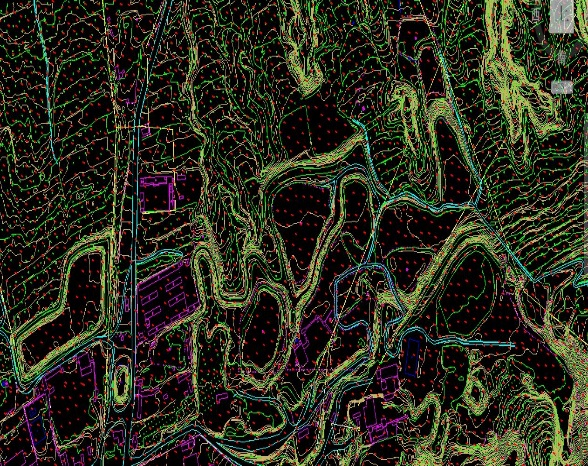 图4 DLG数据
图4 DLG数据
2.3精度检核
经过点云过滤与分类处理后,共获取地表点云数据1.72G,共2916万个点。在点云数据中共抽取22个点进行外业精度检核。抽取原则应顾及激光雷达的植被穿透能力测验。同时为了检验结果的准确性,在地形高程变化突变处不应选点。外业采用南方银河1Plus RTK分别采集平地、山地、建筑区、植被高密度区、植被稀疏区、岩石裸露地表等不同地形类型的高程,检核点均匀分布整个测区。将RTK实时差分采集的高程与相应的点云高程进行对比分析[11],分析结果见表1。
表1高程比对分析表
|
点号 |
X |
Y |
激光H |
RTK H |
差值DH |
|
1 |
40****.376 |
43*****.054 |
894.69 |
894.742 |
-0.052 |
|
2 |
40****.244 |
43*****.491 |
884.690 |
884.667 |
0.023 |
|
3 |
40****.172 |
43*****.157 |
865.140 |
865.123 |
0.017 |
|
4 |
40****.399 |
43*****.389 |
905.170 |
905.146 |
0.024 |
|
5 |
40****.225 |
43*****.967 |
914.760 |
914.739 |
0.021 |
|
6 |
40****.445 |
43*****.061 |
892.680 |
892.699 |
-0.019 |
|
7 |
40****.262 |
43*****.945 |
887.690 |
887.677 |
0.013 |
|
8 |
40****.233 |
43*****.011 |
885.430 |
885.438 |
-0.008 |
|
9 |
40****.280 |
43*****.009 |
905.620 |
905.645 |
-0.025 |
|
10 |
40****.220 |
43*****.903 |
932.950 |
932.953 |
-0.003 |
|
11 |
40****.361 |
43*****.012 |
953.910 |
953.903 |
0.007 |
|
12 |
40****.371 |
43*****.180 |
900.720 |
900.761 |
-0.041 |
|
13 |
40****.590 |
43*****.695 |
892.876 |
892.862 |
0.014 |
|
14 |
40****.444 |
43*****.371 |
886.888 |
886.877 |
0.011 |
|
15 |
40****.716 |
43*****.377 |
886.255 |
886.203 |
0.052 |
|
16 |
40****.774 |
43*****.211 |
881.625 |
881.599 |
0.026 |
|
17 |
40****.692 |
43*****.788 |
922.296 |
922.244 |
0.052 |
|
18 |
40****.166 |
43*****.747 |
985.503 |
985.461 |
0.042 |
|
19 |
40****.265 |
43*****.173 |
892.448 |
892.423 |
0.025 |
|
20 |
40****.000 |
43*****.250 |
924.271 |
924.279 |
-0.008 |
|
21 |
40****.987 |
43*****.141 |
1002.844 |
1002.887 |
-0.043 |
|
22 |
40****.791 |
43*****.080 |
870.733 |
870.708 |
0.025 |
外业检核结果对比分析表明:22个检核点的最大高程误差为0.052m,测区整体平均高程误差小于0.1cm,标准差为0.0025m,说明测量数据偏离真实值的程度比较小,测量精度比较高,数据误差非常稳定。经22个检核点的高程计算得到点位高程中误差为0.03m。数据表明随着机载激光雷达技术的进步,现代激光雷达设备已经能够达到很高的精度水平。
激光实际并不能直接穿透植被的枝叶,而是激光脉冲能够穿过枝叶的缝隙并能反射回波,从而获取地表DEM的数据信息。激光脉冲透过树冠达到地面的单位面积的点云密度也是验证机载激光雷达设备能否高质量完成大比例尺地形图测绘的重要指标。目前雷达技术突飞猛进,在疏林区、地表裸露区激光雷达扫描均能够达到很高的点云密度水平。本次基于密林区域提取地表点,实验计算密林区域的点云密度。测区共随机圈分了3个密林区域,点云密度提取结果见表2。
表2密林区地表点云密度统计表 单位(个/m2)
|
编号 |
区域1 |
区域2 |
区域3 |
平均 |
|
点云密度 |
2.3 |
2.4 |
2.5 |
2.4 |
由上表可知密林区地表点云密度单位面积内能达到2个以上的水平。实验表明应用机载激光雷达技术在高程精度上及地表点云密度上均能够满足丘陵地区1:500地形图测图的精度要求。
3 结论
本实验区按照1:500地形图测量规范的技术要求,以飞马D2000机载激光雷达设备为测量平台,通过获取的点云数据进行点云高程精度和密度的分析试验。结果表明,无人机机载激光雷达获取的点云数据经过专业软件处理后,无论是高程精度还是点云密度均能够达到很高的水平,无人机机载激光雷达技术能够满足满足丘陵地区大比例尺地形图测图的精度要求。随着软件技术、硬件平台的多样化发展,机载激光雷达技术未来仍会有很大的发展潜力。未来在工程测量、林业管理、智慧城市建设、国土资源监察等方面都有着广阔的应用前景。
参考文献
[1]李雪松.机载激光LIDAR原理及应用[J]. 测绘与空间地理信息,2015,38
(2):221-224.[2]郑若琳,洪亮.机载激光雷达的优势与发展[J].地理空间信息,2018,16(2):37-39.
[3]张昕, 康光清,冯洋,等.基于倾斜摄影与地面激光扫描技术的三维实景建模[J].测绘与空间地理信息, 2021,44(S1):287-290.
[4]王水满.基于激光雷达的植保无人机自主避障技术研究[D] .河北:华北理工大学,2020.
[5]李想.面向航空构件典型特征的三维激光测量技术研究[D]. 江苏:南京航空航天大学,2019.
[6] 蒋小海.机载激光雷达在山区大比例尺地形图采集中的应用[J].智能城市,2021,7(22):58-59.
[7]李鑫龙,仲懿,潘跃武.机载激光雷达技术在水利水电测绘工程中的应用[J].建筑技术开发,2021(19):76-77.
[8] 温立文,李芳芳.无人机在电力线路工程勘测设计中的应用研究[J].科技资讯,2017,15(27):59-60.
[9] 岁有中,张新霞.机载激光雷达在矿山1:2000 DEM生产中的应用[J].地矿测绘,2018,34(02):34-35+38.
[10] 李卫良,龙世林.无人机载激光雷达在山区地形图测绘中的应用[J].科技创新与应用,2020(36):145-147.
[11]张广波.机载激光雷达在密林山区地形测绘中的应用与质量分析[J].国土资源信息化,2021(04):28-33.
上一篇:

我们主要从事地质灾害勘查、地质灾害危险性评估、地球物理勘查、地质测绘、工程测量、地籍测绘、矿产勘查、人工地基检测、岩土工程勘察施工及地质灾害治理施工等业务。
联系我们

浏览手机端
